


vmc1060 מפעל מתכת 3 צירים אנכית מרכז מכונת כרסום cnc
יתרון
1. פטיפון CNC אופציונלי יכול ליצור עיבוד קישור קואורדינטות עם ארבעה צירים וחמישה צירים.
2. מכשיר להסרת שבב אוטומטי אופציונלי, עם מבנה המיטה כדי להבטיח את הניקיון הפנימי;קירור שמן ציר אופציונלי וכו'.
3. היציקה עוברת שני טיפולי יישון להעלמת מתח שיורי בחומר.
4. מדריכים לכיוון X, Y, Z יכולים לבחור את מדריכי הכדור הליניאריים הכבדים של טייוואן, בעלי המאפיינים של מהירות מהירה, קשיחות גבוהה וכן הלאה.

מִפרָט
| פריט | VMC1060 | ||||
| גודל שולחן העבודה (אורך × רוחב) מ"מ | 1300×600 | ||||
| חריץ T (מ"מ) | 5-18×100 | ||||
| משקל טעינה מקסימלי על שולחן עבודה (ק"ג) | 650 | ||||
| תנועה של ציר X (מ"מ) | 1000 | ||||
| תנועה של ציר Y (מ"מ) | 600 | ||||
| תנועה בציר Z (מ"מ) | 600 | ||||
| מרחק בין חרטום ציר לשולחן (מ"מ) | 100-700 | ||||
| מרחק בין מרכז הציר לעמודה (מ"מ) | 667 | ||||
| מתחדדת הציר | BT40/50 | ||||
| מקסימוםמהירות ציר (סל"ד) | 8000/10000/12000 | ||||
| כוח מנוע ציר (Kw) | 15/11 | ||||
| מהירות הזנה מהירה: ציר X,Y,Z (מ/דקה) | 16/16/16 (24/24//24 הדרכת אניה) | ||||
| מהירות חיתוך מהירה (מ'/דקה) | 10 | ||||
| דיוק מיקום (מ"מ) | ±0.005 | ||||
| דיוק מיקום חוזר (מ"מ) | ±0.003 | ||||
| סוג מחליף כלים אוטומטי | מחליף כלים מסוג 16 כלים (מחליף כלים אוטומטי מסוג 24 זרועות אופציונלי) | ||||
| מקסימוםאורך הכלי (מ"מ) | 300 | ||||
| מקסימוםקוטר הכלי | Φ80(כלי סמוך)/φ150(כלי לא סמוך) | ||||
| משקל הכלי המקסימלי (ק"ג) | 8 | ||||
| זמן שינוי הכלי (כלי לכלי) שניות | 7 | ||||
| לחץ אוויר (Mpa) | 0.6 | ||||
| משקל מכונה (ק"ג) | 7500 | ||||
| גודל כולל (מ"מ) | 3340*2800*2700 | ||||
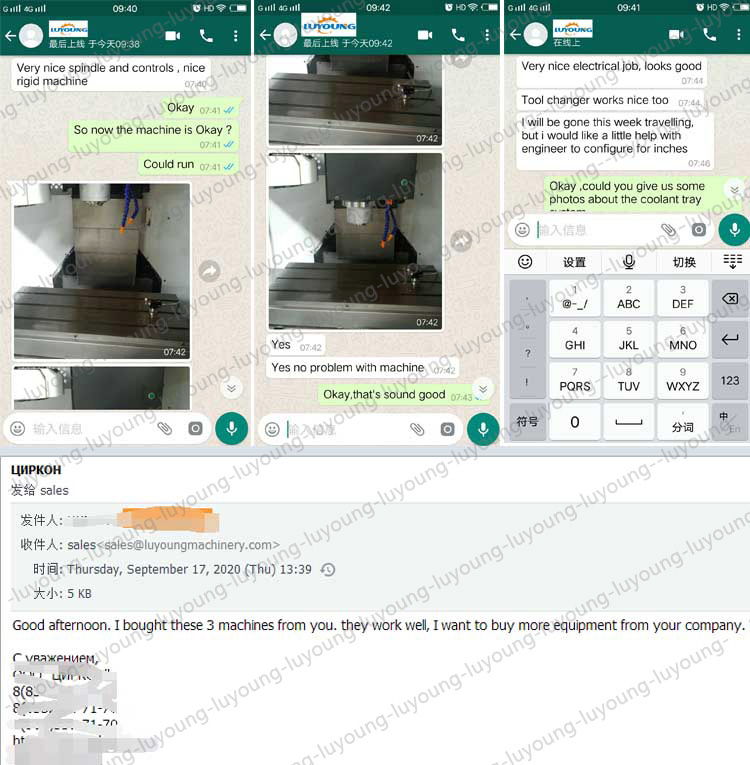
מדוע לבחור בנו
אנו מקבלים הרבה משוב טוב מלקוחות, למשל:
ציר נחמד מאוד ובקרות, מכונה קשיחה נחמדה.עבודת חשמל נחמדה מאוד, נראית טוב.
גם מחליף כלים עובד יפה.
קניתי ממך 3 מכונות.הם עובדים טוב, אני רוצה לקנות עוד ציוד מהחברה שלך.
בדיקת מכונה
1. זיהוי דיוק המיקום של תנועה ליניארית צריך להתבצע בתנאי ללא עומס, ומדידה לייזר תגבר.
2. זיהוי דיוק מיקום חוזר של תנועה ליניארית, המכשיר המשמש לזיהוי זהה לזה המשמש לזיהוי דיוק המיקום.
3. זיהוי דיוק ההחזרה של מקור התנועה הלינארית.
4. זיהוי שגיאה הפוכה של תנועה ליניארית נמדד מספר פעמים (בדרך כלל 7 פעמים) בשלושה מיקומים ליד נקודת האמצע ושני קצוות המהלך, והערך הממוצע של כל מיקום מחושב, והערך המרבי של הערך הממוצע המתקבל הוא ערך השגיאה ההפוכה.






